
깊이 카메라 D435i
Intel® RealSense™ 깊이 카메라 D435i는 D435의 강력한 깊이 감지 기능과 IMU(관성 측정 장치)를 결합합니다.

IMU를 추가하면 애플리케이션이 카메라가 움직이는 모든 상황에서 깊이 인식을 개선할 수 있습니다. 이는 더 나은 포인트 클라우드 정렬을 허용하는 기초적인 SLAM 및 추적 애플리케이션의 문을 엽니다. 또한 로봇 및 드론에 대한 환경 인식을 개선할 수 있습니다. IMU를 사용하면 핸드헬드 스캐닝 시스템 사용 사례에 대한 등록 및 보정이 더 쉬워지고 가상/증강 현실 및 드론과 같은 분야에서도 중요합니다. D435i를 사용할 때 Intel RealSense SDK 2.0은 고품질 깊이 데이터에 맞춰 타임 스탬프가 찍힌 IMU 데이터를 제공합니다.
IMU란?
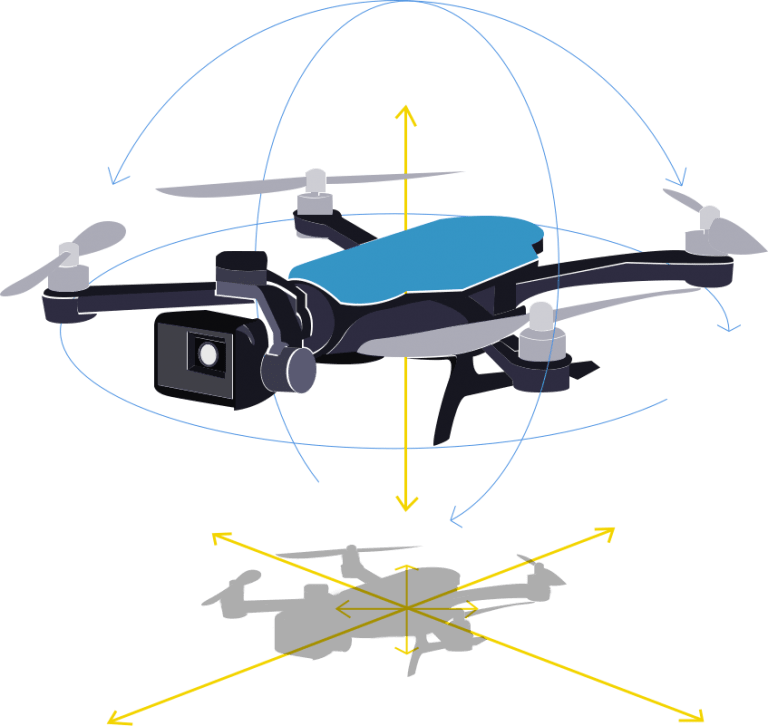
관성 측정 장치(IMU)는 6자유도(6DoF)에서 움직임과 회전을 감지하는 데 사용됩니다. IMU는 다양한 센서를 자이로스코프와 결합하여 피치, 요 및 롤뿐만 아니라 3축의 회전 및 움직임을 모두 감지합니다. 게임 및 포인팅 장치와 이미지 안정화와 같은 응용 프로그램에 사용됩니다.
움직임과 깊이
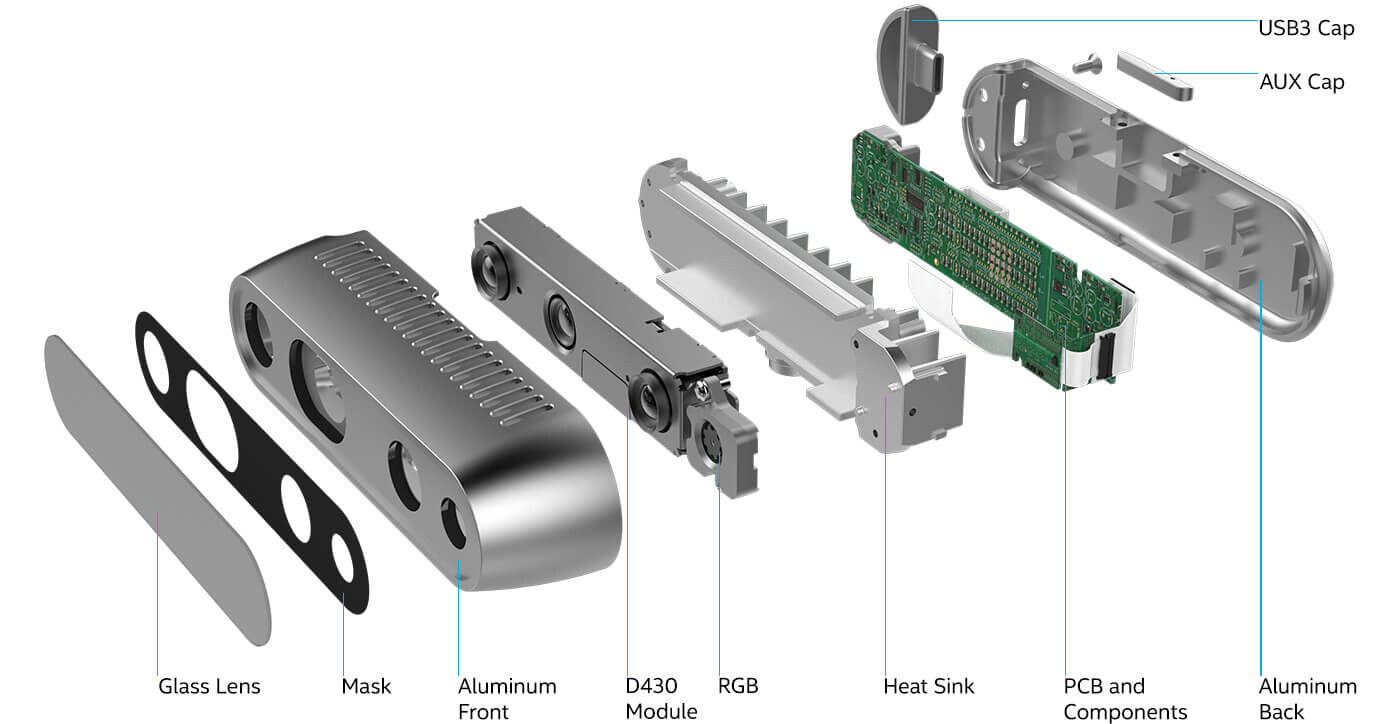
개발 및 제품화를 위한 통합 솔루션

Intel® RealSense™ D435i는 최첨단 스테레오 깊이 카메라에 IMU를 배치합니다. 소형 폼 팩터에 인텔 모듈 및 비전 프로세서가 포함된 D435i는 자체 움직임을 이해할 수 있는 깊이 카메라용 맞춤형 소프트웨어와 결합할 수 있는 강력하고 완전한 패키지입니다.
움직이는 카메라에 적합
D435i의 넓은 시야와 글로벌 셔터 센서의 조합은 로봇 내비게이션 및 물체 인식과 같은 애플리케이션에 선호되는 솔루션입니다. 시야각이 넓어 하나의 카메라로 더 많은 영역을 커버할 수 있어 "사각지대"가 줄어듭니다. 글로벌 셔터 센서는 뛰어난 저조도 감도를 제공하여 조명이 꺼진 상태에서 로봇이 공간을 탐색할 수 있도록 합니다.
간단한 통합을 위한 완벽한 제품군

깊이 카메라 D435i는 Intel® RealSense™ D400 카메라 시리즈의 일부로, Intel의 최신 깊이 감지 하드웨어 및 소프트웨어를 통합하기 쉬운 제품으로 패키징하는 라인업입니다. 장치에 깊이 감지 기능을 제공하려는 개발자, 제조업체 및 혁신가에게 완벽한 Intel® RealSense™ D400 시리즈 카메라는 간단한 기본 통합을 제공하고 완전히 새로운 세대의 지능형 비전 장착 솔루션을 가능하게 합니다.
Features
|
Use environment:
|
Ideal range:
|
Depth
|
Depth technology:
|
Depth Field of View (FOV):
|
RGB
|
RGB frame resolution:
|
RGB sensor FOV (H × V):
|
Major Components
|
Camera module:
|
Vision processor board:
|
Physical
|
Form factor:
|
Connectors:
|